Основы ПИД-регулирования и методы его настройки
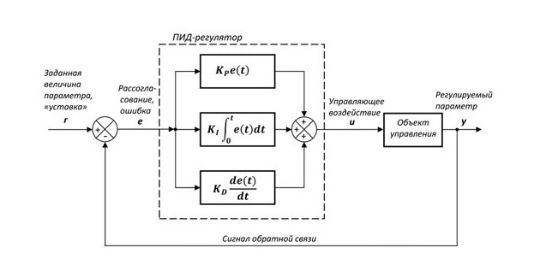
ПИД-регулятор — это алгоритм, который автоматизирует именно такие интуитивные действия. Он вычисляет управляющее воздействие на объект (двигатель, нагреватель, клапан) на основе ошибки (e) — разницы между желаемым значением (уставкой, y) и реальным значением (r).
e(t) = y - r(t)
e(t) = y - r(t)
Разбираем "П", "И", "Д" по косточкам:
Формула ПИД-регулятора выглядит так:
U(t) = P + I + D = Kp * e(t) + Ki * ∫e(t)dt + Kd * (de(t)/dt)
Где:
• U(t) — управляющий сигнал (что подаем на объект).
• Действие: P = Kp * e(t). Реакция прямо пропорциональна текущей ошибке.
• Физический смысл: "Чем дальше мы от цели, тем сильнее давим".
Что дает?
• Скорость реакции. Большой Kp — быстрая реакция на отклонение.
• Статическая ошибка. Недостаток чистого P-регулятора. Он даст сигнал только пока есть ошибка. В примере с машиной: чтобы поддерживать скорость на подъеме, педаль должна быть нажата сильнее, чем на ровном месте. P-регулятор установит не 60 км/ч, а, скажем, 58 км/ч, и этой ошибки будет достаточно, чтобы удержать газ. Система стабилизируется, но не в той точке, где нужно.
2 Интегральная составляющая (I) — "Прошлое"
• Действие: I = Ki * ∫e(t)dt. (верхняя и нижняя граница интеграла от 0 до t)Реакция пропорциональна интегралу (сумме за время) ошибки.
• Физический смысл: "Мы копили эту маленькую ошибку всё время, и теперь дадим команду, чтобы её окончательно ликвидировать". Она "помнит" историю отклонений.
Что дает?
• Устранение статической ошибки. Это главная работа I-составляющей. Она будет медленно наращивать сигнал, пока ошибка не станет ровна нулю.
• Недостаток: Может вызывать "перерегулирование" (система по инерции проскочит заданное значение) и колебания. Слишком большой Ki — система становится "медлительной" и "раскачивается".
3. Дифференциальная составляющая (D) — "Будущее"
• Действие: D = Kd * (de(е)/dt). Реакция пропорциональна скорости изменения (производной) ошибки.
• Физический смысл: "Ошибка начала уменьшаться слишком быстро? Давай ослабим воздействие заранее, чтобы не проскочить!" Она предупредительная, пытается демпфировать (гасить) резкие изменения.
Что дает?
• Сглаживание процесса, уменьшение перерегулирования и колебаний. Повышает устойчивость системы.
• Недостаток: Чрезвычайно чувствительна к шумам в сигнале. Резкий скачок из-за помехи даст огромную производную и "дерганье" регулятора. Часто требует фильтрации сигнала.
Основные методы расчета (настройки) коэффициентов
Мы подошли к главному инженерному вопросу: Как подобрать Kp, Ki, Kd?
Метод 1: Аналитический (по модели объекта)
Это самый правильный, но сложный метод, требующий глубоких знаний ТАУ.
• Суть: У вас должна быть математическая модель объекта управления (дифференциальное уравнение, передаточная функция).
• Действия: Вы формулируете критерии качества (время переходного процесса, перерегулирование и т.д.). Далее, зная модель объекта и структуру ПИД-регулятора, вы аналитически или численно решаете систему уравнений, чтобы найти коэффициенты, обеспечивающие эти критерии.
• Когда используется: В сложных, ответственных или нестандартных системах, где важна оптимальность.
Метод 2: Экспериментальный метод Циглера-Николса (классический)
Самый известный практический метод. Проводится непосредственно на реальном объекте или его точной имитационной модели.
• Шаг 1: Нахождение критического коэффициента Kp1. Отключаем интегральную (Ki=0) и дифференциальную (Kd=0) составляющие. Плавно увеличиваем Kp1 от нуля до такого значения Kр1, при котором в системе возникают незатухающие равномерные колебания.
• Шаг 2: Измерение критического периода. Замеряем период этих колебаний T.
• Шаг 3: Подстановка в таблицу. По таблице рассчитываем коэффициенты для разных типов регуляторов.
Kp = 0.6 * Kp1 - где Kp1 коэффициент Kp, который обеспечивает незатухающие равномерные колебания.
Формула ПИД-регулятора выглядит так:
U(t) = P + I + D = Kp * e(t) + Ki * ∫e(t)dt + Kd * (de(t)/dt)
Где:
• U(t) — управляющий сигнал (что подаем на объект).
• Kp, Ki, Kd — настраиваемые коэффициенты. Искусство настройки ПИД — это подбор этих трех "волшебных чисел".
1.Пропорциональная составляющая (P) — "Настоящее"
• Физический смысл: "Чем дальше мы от цели, тем сильнее давим".
Что дает?
• Скорость реакции. Большой Kp — быстрая реакция на отклонение.
• Статическая ошибка. Недостаток чистого P-регулятора. Он даст сигнал только пока есть ошибка. В примере с машиной: чтобы поддерживать скорость на подъеме, педаль должна быть нажата сильнее, чем на ровном месте. P-регулятор установит не 60 км/ч, а, скажем, 58 км/ч, и этой ошибки будет достаточно, чтобы удержать газ. Система стабилизируется, но не в той точке, где нужно.
2 Интегральная составляющая (I) — "Прошлое"
• Действие: I = Ki * ∫e(t)dt. (верхняя и нижняя граница интеграла от 0 до t)Реакция пропорциональна интегралу (сумме за время) ошибки.
• Физический смысл: "Мы копили эту маленькую ошибку всё время, и теперь дадим команду, чтобы её окончательно ликвидировать". Она "помнит" историю отклонений.
Что дает?
• Устранение статической ошибки. Это главная работа I-составляющей. Она будет медленно наращивать сигнал, пока ошибка не станет ровна нулю.
• Недостаток: Может вызывать "перерегулирование" (система по инерции проскочит заданное значение) и колебания. Слишком большой Ki — система становится "медлительной" и "раскачивается".
3. Дифференциальная составляющая (D) — "Будущее"
• Действие: D = Kd * (de(е)/dt). Реакция пропорциональна скорости изменения (производной) ошибки.
• Физический смысл: "Ошибка начала уменьшаться слишком быстро? Давай ослабим воздействие заранее, чтобы не проскочить!" Она предупредительная, пытается демпфировать (гасить) резкие изменения.
Что дает?
• Сглаживание процесса, уменьшение перерегулирования и колебаний. Повышает устойчивость системы.
• Недостаток: Чрезвычайно чувствительна к шумам в сигнале. Резкий скачок из-за помехи даст огромную производную и "дерганье" регулятора. Часто требует фильтрации сигнала.
Основные методы расчета (настройки) коэффициентов
Мы подошли к главному инженерному вопросу: Как подобрать Kp, Ki, Kd?
Метод 1: Аналитический (по модели объекта)
Это самый правильный, но сложный метод, требующий глубоких знаний ТАУ.
• Суть: У вас должна быть математическая модель объекта управления (дифференциальное уравнение, передаточная функция).
• Действия: Вы формулируете критерии качества (время переходного процесса, перерегулирование и т.д.). Далее, зная модель объекта и структуру ПИД-регулятора, вы аналитически или численно решаете систему уравнений, чтобы найти коэффициенты, обеспечивающие эти критерии.
• Когда используется: В сложных, ответственных или нестандартных системах, где важна оптимальность.
Метод 2: Экспериментальный метод Циглера-Николса (классический)
Самый известный практический метод. Проводится непосредственно на реальном объекте или его точной имитационной модели.
• Шаг 1: Нахождение критического коэффициента Kp1. Отключаем интегральную (Ki=0) и дифференциальную (Kd=0) составляющие. Плавно увеличиваем Kp1 от нуля до такого значения Kр1, при котором в системе возникают незатухающие равномерные колебания.
• Шаг 2: Измерение критического периода. Замеряем период этих колебаний T.
• Шаг 3: Подстановка в таблицу. По таблице рассчитываем коэффициенты для разных типов регуляторов.
Kp = 0.6 * Kp1 - где Kp1 коэффициент Kp, который обеспечивает незатухающие равномерные колебания.
Ki= ( 2 * Kp ) / T - где T, период колебаний.
Kd = (Kp * T) / 8
Пример:
Пример:
Допустим что мы определили коэффициент Kp1 = 100, при этом T(период колебаний) составляет 200 мс(0.2 c). Тогда согласно формулам:
Kp = 0.6 * 100 = 60
Ki = (2 * 60) / 0.2 = 600
Kd = (60 * 0.2) / 8 = 1.5
На этом процедура подсчета коэффициентов заканчивается.
• Плюсы: Универсален, не требует модели.
• Минусы: Не для всех объектов безопасно выводить систему в режим колебаний.
Метод 3: Инженерный (метод проб и ошибок)
Самый распространенный на практике для несложных систем.
• Алгоритм настройки ПИ-регулятора:
1. Настройка P. Ki и Kd ставим в 0. Увеличиваем Kp до появления затухающих колебаний с перерегулированием ~10-30%. Запоминаем это значение Kp.
2. Настройка I. Начинаем медленно увеличивать Ki. Колебания будут усиливаться. Уменьшаем Kp на 10-20%, чтобы их компенсировать. Цель — получить плавный выход на уставку без статической ошибки. Процесс должен быть слегка колебательным.
3. Настройка D (если нужна). Если система после шагов 1-2 слишком "раскачана" или медленная, вводим Kd. Плавно увеличиваем его, наблюдая за сглаживанием процесса.
Практические советы на пальцах:
1. Начинайте с П-регулятора. Поймите, как ведет себя объект.
2. Добавляйте компоненты по очереди: P -> PI -> PID.
3. Делайте изменения небольшими. Меняйте коэффициенты на 10-30% за шаг, а не в разы.
4. Помните про насыщение. Реальный привод (двигатель, нагреватель) имеет пределы. Интегральная составляющая в этот момент "накапливается" и вызывает "Integral Windup" — долгие затухающие колебания после выхода из насыщения. Часто в алгоритмах вводят "Anti-Windup".
• Плюсы: Универсален, не требует модели.
• Минусы: Не для всех объектов безопасно выводить систему в режим колебаний.
Метод 3: Инженерный (метод проб и ошибок)
Самый распространенный на практике для несложных систем.
• Алгоритм настройки ПИ-регулятора:
1. Настройка P. Ki и Kd ставим в 0. Увеличиваем Kp до появления затухающих колебаний с перерегулированием ~10-30%. Запоминаем это значение Kp.
2. Настройка I. Начинаем медленно увеличивать Ki. Колебания будут усиливаться. Уменьшаем Kp на 10-20%, чтобы их компенсировать. Цель — получить плавный выход на уставку без статической ошибки. Процесс должен быть слегка колебательным.
3. Настройка D (если нужна). Если система после шагов 1-2 слишком "раскачана" или медленная, вводим Kd. Плавно увеличиваем его, наблюдая за сглаживанием процесса.
Практические советы на пальцах:
1. Начинайте с П-регулятора. Поймите, как ведет себя объект.
2. Добавляйте компоненты по очереди: P -> PI -> PID.
3. Делайте изменения небольшими. Меняйте коэффициенты на 10-30% за шаг, а не в разы.
4. Помните про насыщение. Реальный привод (двигатель, нагреватель) имеет пределы. Интегральная составляющая в этот момент "накапливается" и вызывает "Integral Windup" — долгие затухающие колебания после выхода из насыщения. Часто в алгоритмах вводят "Anti-Windup".
Примеры "Anti-Windup":
• Ограничение (Clamping): Как только управляющий сигнал достигает 100%, мы просто замораживаем накопление интеграла. Мы говорим регулятору: «Смысла копить ошибку дальше нет, мы всё равно уперлись в потолок мощности».
• Сброс интеграла: Если выход регулятора вошел в насыщение, интегральная часть принудительно обнуляется или ограничивается разумным пределом.
• Внешняя обратная связь: Интеграл вычисляется с учетом реальной разницы между тем, что регулятор «хотел» выдать, и тем, что привод «смог» выдать.
5. Сначала добейтесь работы на симуляции, если это возможно.
• Сброс интеграла: Если выход регулятора вошел в насыщение, интегральная часть принудительно обнуляется или ограничивается разумным пределом.
• Внешняя обратная связь: Интеграл вычисляется с учетом реальной разницы между тем, что регулятор «хотел» выдать, и тем, что привод «смог» выдать.
5. Сначала добейтесь работы на симуляции, если это возможно.
ПИД-регулятор — это гениальное по своей простоте и эффективности сочетание трех идей: реагировать на текущую ошибку (P), помнить прошлые ошибки (I) и предвидеть будущие (D). Его настройка — это компромисс между скоростью, точностью и устойчивостью. Не существует "идеальных" коэффициентов на все случаи жизни. Умение их подбирать — это 20% теории и 80% практики и интуиции, которая приходит с опытом.